Construction du mécanisme¶
La construction du modèle Meca3D se fait à partir de l'assemblage SolidWorks et permet de définir les pièces, les liaisons et les efforts.
Ajout des pièces¶
Pour ajouter des pièces, faire un clic droit sur Pièces dans l'arbre de Meca3D puis Ajouter.
Ce mode permet de définir les pièces une par une soit en utilisant les caractéristiques des composants SolidWorks soit manuellement.
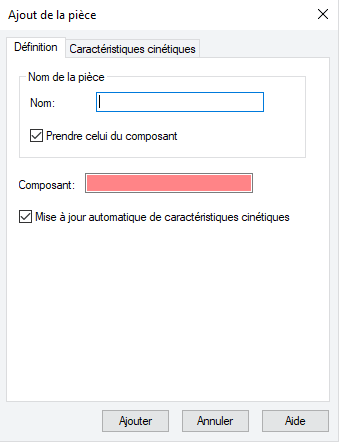
Sélectionnez une pièce à ajouter, puis cliquez sur Ajouter, faire ainsi pour chacune des pièces ou chaque sous-assemblage du mécanisme. Une fois toutes les pièces insérées, cliquez sur Annuler pour passer à l'ajout des liaisons.
Pièce de référence
La première pièce ajoutée dans Meca3D doit-être le bâti !
Ajout des liaisons¶
Pour ajouter des pièces, faire un clic droit sur Liaisons dans l'arbre de Meca3D puis Ajouter.
Ajouter une liaison¶
-
Sélection du type de liaison
19 liaisons disponiblesPonctuelle Linéaire annulaire Linéaire rectiligne Rotule Appui plan Pivot glissant Glissière Pivot Hélicoïdale Engrenage cylindrique Engrenage conique Roue et vis -
Sélection des pièces
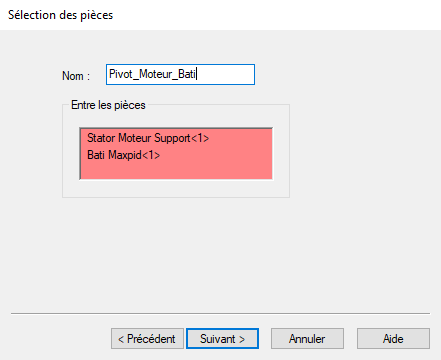
La sélection des pièces se fait sur la zone graphique ou dans l'arbre de modélisation Meca3D ou dans l'arbre de création SolidWorks.Nom des liaisons
Il est conseillé de donner un nom compréhensible à la liaison pour la retrouver facilement dans l'arbre de Meca3D.
-
Définition des données géométriques
2 modes de définitions sont disponibles :-
Définition d'une liaison par contraintes :
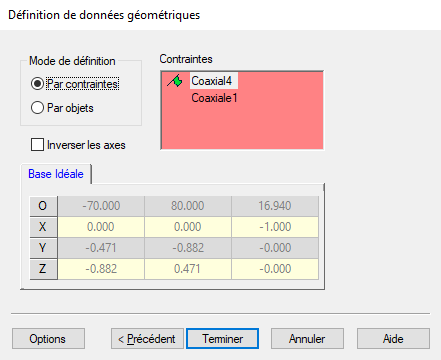
Dans ce cas Meca3D affiche automatiquement la liste des contraintes géométriques existant entre les 2 pièces.Il suffit alors de sélectionner la ou les contraintes nécessaires. Lorsque la contrainte est compatible avec la nature de la liaison un drapeau
 s'affiche devant la contrainte choisie.
s'affiche devant la contrainte choisie.Cette option est désactivée si aucune contrainte compatible n'est trouvée.
-
Définition d'une liaison par objet :
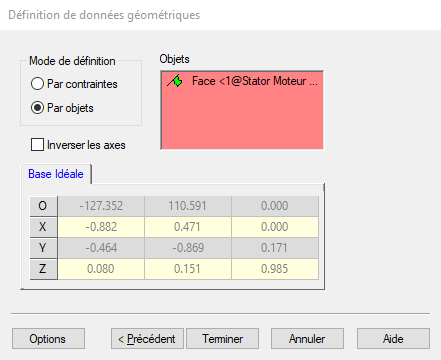
Dans ce cas il faut sélectionner dans la fenêtre graphique les entités géométriques acceptables (faces, plans, esquisses ...) qui seront analysées par Meca3D pour définir la base idéale de la liaison.
Lorsque les conditions sont satisfaites, un drapeau
s'affiche devant chaque objet.Si plusieurs objets sont nécessaires, la sélection de ceux-ci se fait en maintenant la touche
Ctrlenfoncée.La liste des objets possibles pour chaque liaison est disponible ici
-
Remarque
Certaines liaisons nécessitent une procédure particulière pour la définition. Cette particularité est indiquée au niveau de la boite de dialogue pour la sélection des pièces de la façon suivante : 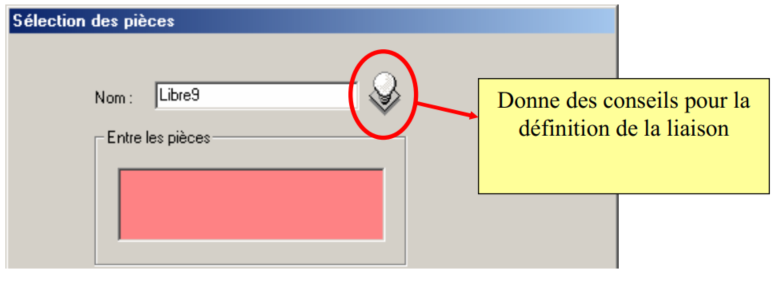
Ajout des liaisons par contraintes¶
| Liaison | Liste des contraintes acceptables |
|---|---|
 Ponctuelle | Coïncident (Plan, Point) (Cylindre, Point) (Sphère, Point) Tangent (Plan, Sphère) (Cylindre, Sphère) (Sphère, Sphère) (Cône, Sphère) |
 Linéaire annulaire | Coïncident (Ligne, Point) Coaxial (Face cylindrique, Point) (Face cylindrique, face sphérique) (Face cylindrique, Face cylindrique) |
 Linéaire rectiligne | Coïncident (Plan, Ligne) Parallèle (Plan, Ligne) |
 Rotule | Coïncident (Point, Point) (Ligne, Point) Concentrique (Face sphérique, Face sphérique) |
 Rotule à doigt | Coïncident (Point, Point) (Ligne, Point) Concentrique (Face sphérique, Face sphérique) |
 Appui plan | Coïncident (Plan, Plan) Parallèle (Plan, Plan) A distance (Plan, Plan) |
 Pivot | Coaxial (Face cylindrique, Face cylindrique) |
 Pivot glissant | Coaxial (Face cylindrique, Face cylindrique) |
 Pivot anti-retour | Coaxial (Face cylindrique, Face cylindrique) |
 Hélicoïdale | Coaxial (Face cylindrique, Face cylindrique) |
 Glissière | Coaxial (Face cylindrique, Face cylindrique) Parallèle (Plan, Plan) |
 Glissière anti-retour | Coaxial (Face cylindrique, Face cylindrique) Parallèle (Plan, Plan) |
 Engrenage cylindrique | Tangent (Face cylindrique, Face cylindrique) |
 Roue vis | Tangent (Face cylindrique, Face cylindrique) |
 Pignon crémaillère | Tangent (Face cylindrique, Plan) |
 Friction cylindrique | Tangent (Face cylindrique, Face cylindrique) |
 Friction cylindre / plan | Tangent (Face cylindrique, Plan) |
Ajout des liaisons par objets¶
| Liaison | Liste des objets acceptables |
|---|---|
Ponctuelle | 1 face (plan, cylindre, sphère ou cône) sur une pièce et 1 sommet (ou une face sphérique) sur l'autre pièce |
Linéaire annulaire | 1 face cylindrique sur une pièce et 1 face sphérique sur l'autre pièce |
Linéaire rectiligne | 1 face plane sur une pièce et 1 arête droite (ou une face cylindrique) sur l'autre pièce |
Rotule | 1 face sphérique sur une pièce |
Rotule à doigt | 1 face sphérique sur une pièce |
Appui plan | 1 face plane sur une pièce |
Pivot | 1 face cylindrique (ou 1 arête circulaire) sur une pièce |
Pivot glissant | 1 face cylindrique (ou 1 arête circulaire) sur une pièce |
Pivot anti-retour | 1 face cylindrique (ou 1 arête circulaire) sur une pièce |
Hélicoïdale | 1 face cylindrique (ou 1 arête circulaire) sur une pièce |
Glissière | 1 face cylindrique (ou 1 arête circulaire) sur une pièce, ou 2 faces plane sur une ou deux pièces |
Glissière anti-retour | 1 face cylindrique (ou 1 arête circulaire) sur une pièce, ou 2 faces plane sur une ou deux pièces |
 Engrenage conique | 1 face conique sur chaque pièce Note : Pour construire la liaison sans avoir à créer les surfaces tangentes correspondant aux cônes primitifs, il faut procéder comme suit : 1. repérer les deux roues dentées 2. repérer un cercle ou un cylindre permettant de définir l'axe de rotation de chaque engrenage ; les deux axes doivent obligatoirement être perpendiculaires 3. saisir le nombre de dents correspondant à chaque roue, la roue numéro 1 correspondant à la première pièce saisie |
Engrenage cylindrique | 1 face cylindrique (ou 1 arête circulaire) sur chaque pièce Note : Pour construire la liaison sans avoir à créer les surfaces tangentes correspondant aux cônes primitifs, il faut procéder comme suit : 1. repérer les deux roues dentées 2. repérer un cercle ou un cylindre permettant de définir l'axe de rotation de chaque engrenage ; les deux axes doivent obligatoirement être perpendiculaires 3. saisir le nombre de dents correspondant à chaque roue, la roue numéro 1 correspondant à la première pièce saisie |
Roue vis | 1 face cylindrique (ou 1 arête circulaire) sur chaque pièce Note : Pour construire la liaison sans avoir à créer les surfaces tangentes correspondant aux cônes primitifs, il faut procéder comme suit : 1. repérer les deux roues dentées 2. repérer un cercle ou un cylindre permettant de définir l'axe de rotation de chaque engrenage ; les deux axes doivent obligatoirement être perpendiculaires 3. saisir le nombre de dents correspondant à chaque roue, la roue numéro 1 correspondant à la première pièce saisie |
Pignon crémaillère | 1 face cylindrique (ou 1 arête circulaire) sur une pièce et 1 face plane (ou 1 arête droite) sur l'autre pièce |
Friction cylindrique | 1 face cylindrique (ou 1 arête circulaire) sur chaque pièce |
 Friction conique | 1 face conique sur chaque pièce |
Friction cylindre / plan | 1 face cylindrique (ou 1 arête circulaire) sur une pièce et 1 face plane (ou 1 arête droite) sur l'autre pièce |
 Came 3D | 1 face cylindrique (ou 1 face sphérique ou 1 face plane sur une pièce) et 1 ou plusieurs surfaces quelconques sur l'autre pièce |
 Libre | 1 face cylindrique (ou 1 arête circulaire ou 1 face plane) sur une pièce |
 Encastrement | 1 face cylindrique (ou 1 arête circulaire ou 1 face plane) sur une pièce |
 Lien souple | 1 face cylindrique (ou 1 arête circulaire) sur chaque pièce |
 Pneu | 1 face cylindrique (ou 1 arête circulaire) sur une pièce et 1 face plane (ou 1 arête droite) sur l'autre pièce |
Ajout des efforts¶
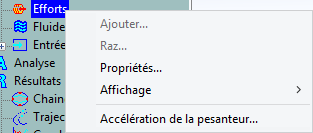
Pour ajouter des efforts, faire un clic droit sur Efforts dans l'arbre de Meca3D puis Ajouter ou Accélération de la pesanteur.
Effort de pesanteur¶
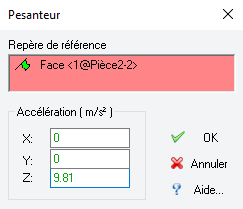
Le poids de toute les composants peut-être pris en compte en donnant la valeur de l'accélération de la pesanteur et la direction de la verticale .
Par défaut, le vecteur accélération de la pesanteur est défini dans le repère du document d'assemblage. Pour choisir un repère de référence, sélectionnez un objet acceptable (une face, un plan, une esquisse, etc.) dans la vue de modèle ou dans l'arbre de création, cet objet sera analysé par Meca3D pour déterminer les trois axes du repère.
Attention
Pour que les efforts soient calculés correctement, il est nécessaire de définir le matériau de chaque composant du système.
Objets acceptables
| Type d’objet | Système de coordonnées | Type d’objets | Système de coordonnées |
|---|---|---|---|
| 1 face plane | Origine : indéterminée X : indéterminé Y : indéterminé Z : normale de la face | 1 esquisse Si elle contient une ligne | Origine : point de départ de la ligne X : direction de la ligne Y : déterminé par Z\landX Z : normale du plan d’esquisse |
| 1 plan | Origine : origine du plan X : axe X du plan Y : axe Y du plan Z : normale du plan | 1 esquisse Si elle contient au moins 2 lignes | Origine : point de départ de la 1ère ligne X : direction de la 1ère ligne Y : direction de la 2ème ligne Z : déterminé par Z\landX |
| 1 esquisse Si elle ne contient aucune ligne | Origine : 1er point de l’esquisse, ou origine du plan d’esquisse si elle ne contient aucun point X : axe X du plan d’esquisse Y : axe Y du plan d’esquisse Z : normale du plan d’esquisse | 1 arête droite | Origine : milieu de l’arête X : direction de l’arête Y : indéterminé Z : indéterminé |
Autres efforts disponibles¶
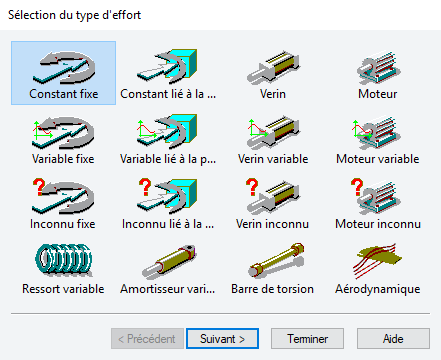
Types d'efforts géré par Meca3D
| Type d’effort | Caractéristiques |
|---|---|
| Constant et fixe | Constant en valeur et de direction fixe dans le repère général. (exemple: action de la pesanteur) |
| Variable et fixe | De direction fixe dans le repère général, mais de valeur variable au cours du mouvement (la définition de cet effort sera réalisée par l’éditeur de courbes). |
| Inconnu et fixe | De direction fixe dans le repère général, mais de valeur inconnue. Cette valeur sera déterminée par Meca3D au cours de l’analyse statique ou dynamique. |
| Constant et liée à la pièce | Constant en valeur et de direction fixe par rapport à une pièce. |
| Variable et liée à la pièce | De direction fixe par rapport à une pièce, mais de valeur variable au cours du mouvement (la définition de cet effort sera réalisée par l’éditeur de courbes). |
| Inconnu et liée à la pièce | De direction fixe par rapport à une pièce, mais de valeur inconnue. Cette valeur sera déterminée par Meca3D au cours de l’analyse statique ou dynamique. |
| Vérin | Permets de définir 2 efforts connus égaux et directement opposés. |
| Vérin variable | Permets de définir 2 efforts variables égaux et directement opposés. (la définition de cet effort sera réalisée par l’éditeur de courbes). |
| Vérin inconnu | Permets de définir 2 efforts inconnus égaux et directement opposés. Cette valeur sera déterminée par Meca3D au cours de l’analyse statique ou dynamique. |
| Moteur | Permets de définir 2 couples connus égaux et directement opposés. Cet effort peut être défini dans une liaison pivot ou pivot glissant. |
| Moteur variable | Permets de définir 2 couples variables égaux et directement opposés. Cet effort peut être défini dans une liaison pivot ou pivot glissant. (la définition de cet effort sera réalisée par l’éditeur de courbes). |
| Moteur inconnu | Permets de définir 2 couples inconnus égaux et directement opposés. Cette valeur sera déterminée par Meca3D au cours de l’analyse statique ou dynamique. Cet effort peut être défini dans une liaison pivot ou pivot glissant. |
| Ressort | Effort exercé par un ressort hélicoïdal à raideur constante. Il est défini par sa longueur à vide et sa raideur. |
| Amortisseur | Ce type d’effort peut uniquement être défini dans une liaison glissière, pivot glissant ou pivot. Il s’oppose au déplacement relatif et la valeur de l’effort est proportionnelle à la vitesse de déplacement. Il est défini par sa constante d’amortissement. |
| Barre de torsion | Effort exercé par une barre de torsion. |
| Aérodynamique | Effort aérodynamique appliqué à une pièce. Il est défini par un fluide. |
Ajouter un effort¶
- Entrez un nouveau nom pour l'effort dans la case
Nomsi le nom actuel ne vous convient pas.
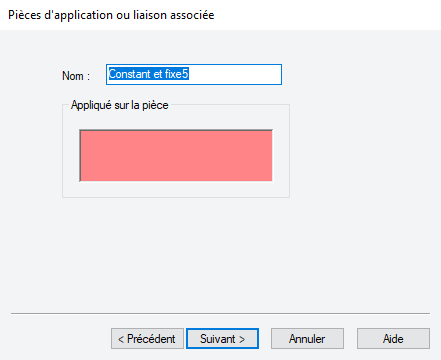
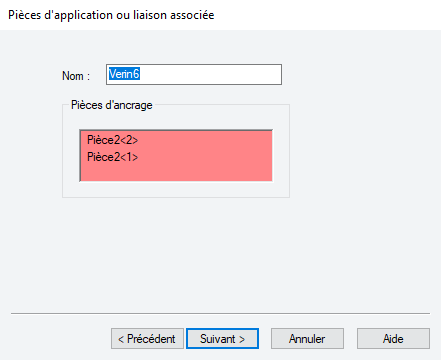
- Sélectionnez
- la pièce d'application dans le cas d'un effort constant et fixe, constant et lié à la pièce, variable et fixe, variable et lié à la pièce, inconnu et fixe, inconnu et lié à la pièce ou aérodynamique ;
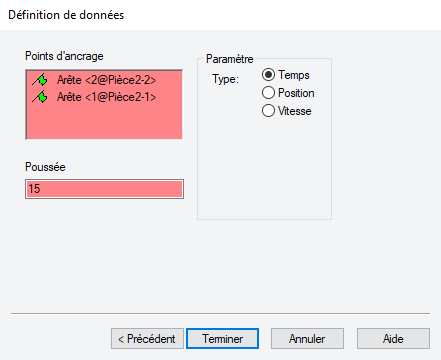
- les deux pièces d'ancrage dans le cas d'un effort ressort, vérin, vérin variable, vérin inconnu ou barre de torsion ;
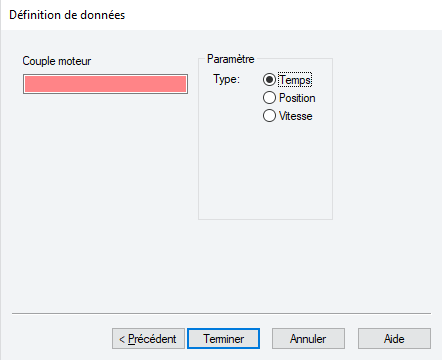
- la liaison concernée dans le cas d'un effort amortisseur, moteur, moteur variable ou moteur inconnu.
-
Définir ensuite les caractéristiques de l'effort
Exemples :- Définition d'un effort
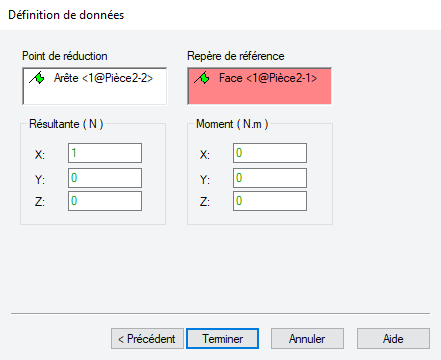
- Choix des points d'ancrage
- Définition d'un effort moteur
Listes d'objets acceptables pour définir le point de réduction
Type d’objet Coordonnées du point de réduction 1 sommet celles du sommet 1 arête circulaire celles du centre de l’arête 1 arête droite celles du milieu de l’arête 1 face sphérique celle du centre de la face 1 plan origine du plan 1 esquisse
Si elle contient des lignespoint de départ de la première ligne 1 esquisse
Si elle contient des points, mais pas de ligne1er point de l’esquisse 1 esquisse
Si elle ne contient ni ligne ni pointorigine du plan d’esquisse - Définition d'un effort
Construction d'un effort variable¶
TODO: A venir
Ajout des fluides¶
Définition du fluide
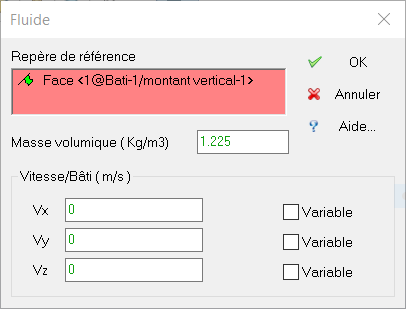
Les effets du fluide sont pris en compte en définissant :
- Le repère de référence du fluide ;
- La masse volumique du fluide ;
- La vitesse de déplacement du fluide selon les axes définis par le repère de référence.
Pour choisir un repère de référence, sélectionnez un objet acceptable (une face, un plan, une esquisse, etc.) dans la vue de modèle ou dans l'arbre de création, cet objet sera analysé par Meca3D pour déterminer les trois axes du repère.
Attention
Les effets des fluides s'appliquent sur l'ensemble du système. Il n'est pas possible de limiter ces effets à une seule pièce dans une étude Meca3D.
Objets acceptables
| Type d’objet | Système de coordonnées | Type d’objets | Système de coordonnées |
|---|---|---|---|
| 1 face plane | Origine : indéterminée X : indéterminé Y : indéterminé Z : normale de la face | 1 esquisse Si elle contient une ligne | Origine : point de départ de la ligne X : direction de la ligne Y : déterminé par Z\landX Z : normale du plan d’esquisse |
| 1 plan | Origine : origine du plan X : axe X du plan Y : axe Y du plan Z : normale du plan | 1 esquisse Si elle contient au moins 2 lignes | Origine : point de départ de la 1ère ligne X : direction de la 1ère ligne Y : direction de la 2ème ligne Z : déterminé par Z\landX |
| 1 esquisse Si elle ne contient aucune ligne | Origine : 1er point de l’esquisse, ou origine du plan d’esquisse si elle ne contient aucun point X : axe X du plan d’esquisse Y : axe Y du plan d’esquisse Z : normale du plan d’esquisse | 1 arête droite | Origine : milieu de l’arête X : direction de l’arête Y : indéterminé Z : indéterminé |
Ajout des entrées¶
Les entrées sont des paramètres variables que l'on peut définir pour piloter notre mécanisme.
Ils peuvent correspondre à une position, une vitesse ou encore un effort qui varient au cours du temps.
Meca3D dispose de trois types d'entrées :
- Courbes : permets de construire une entrée variable ;
- Curseurs : permets de créer un curseur pilotable à la souris qui va servir à tester plusieurs configurations ;
- Formules : permets d'insérer le calcul d'une position variable en fonction du temps en utilisant une équation.
Pour ajouter une entrée, faire un clic droit sur le type d'entrée à ajouter puis Ajouter....
Construction d'une courbe¶
Une fois la courbe ajoutée, le menu suivant s'ouvre :
Vous pouvez alors soit ajouter un fichier associé à une courbe déjà créée, soit créer une nouvelle courbe en cliquant en bas à gauche sur Créer.
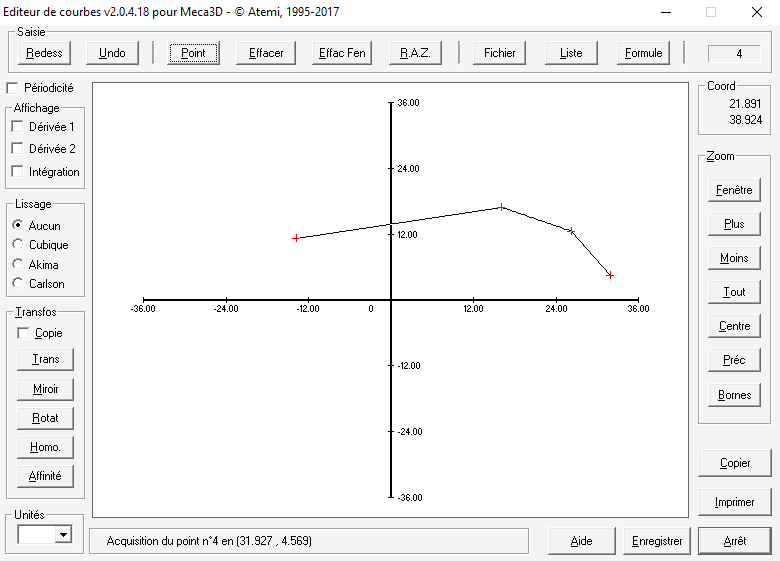
Vous arriver alors dans l'éditeur de courbe.
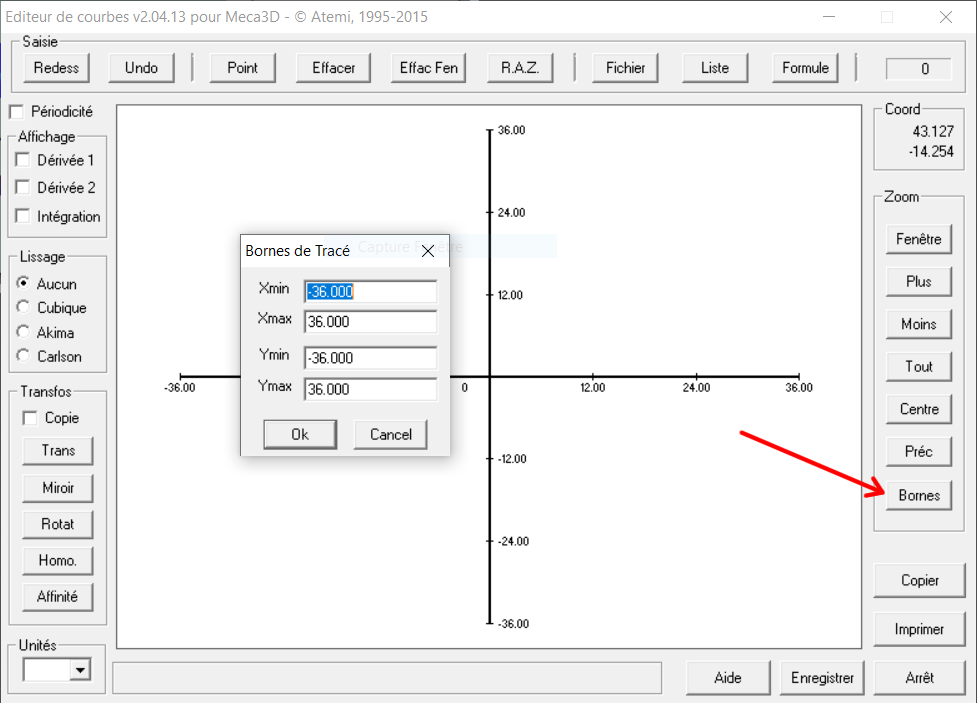
Construction de la courbe
Définir les bornes de l'étude.
 Définir les points de la courbe.
Définir les points de la courbe.
Il existe quatre modes pour définir les points de la courbe :
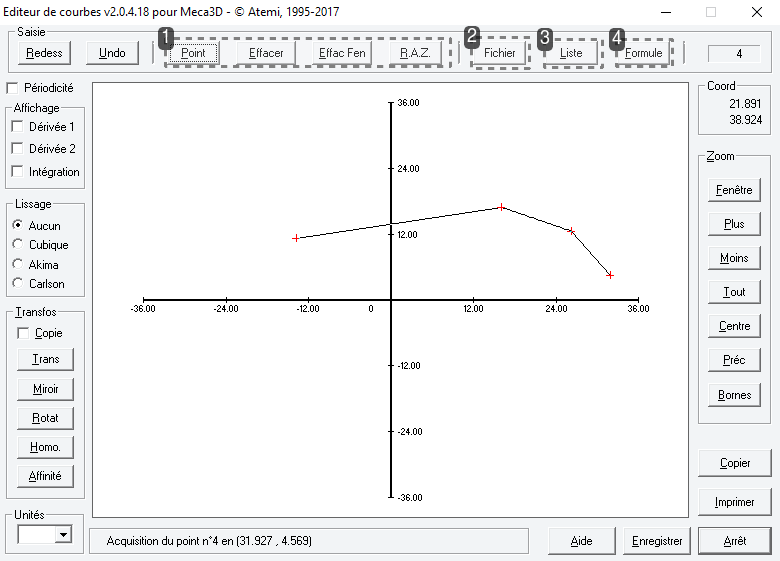
- Point par point

Ajout point par point à la souris. - Fichier

Ajout à partir d'un fichier de courbe existant. - Liste

Ajout à partir d'une liste de points construite point par point. -
Formule

Ajout à partir d'une formule mathématique.Exemple de courbe créée à partir d'une formule. :
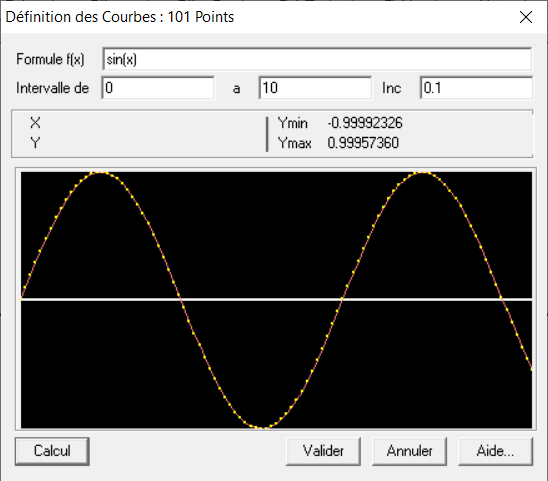
Attention
Le nombre de points maximal est de 1024 points !
Une fois la courbe créée, il faut l'enregistrer en cliquant sur Enregistrer, donner un nom à la courbe et la choisir comme fichier de courbe.
Construction d'un curseur¶
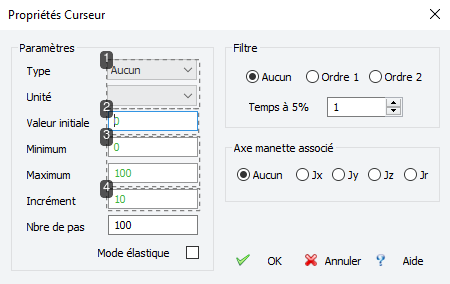
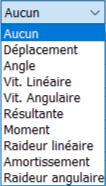
- Type de curseur

Défintion du type de curseur à choisir
L'unité est ensuite à choisir. - Valeur initiale

Définis la valeur initiale du curseur comprise dans l'intervalle fixé. - Intervalle

Définis l'intervalle du curseur par son minimum et son maximum. - Incrément

Définis le pas du curseur.
Construction d'une formule¶
Création d'une entrée par une formule mathématique, le terme t est la variable de la formule.