Résolution d'équations différentielles¶
Utilisation du module scipy pour résoudre les équations différentielles linéaires.
Pour cela on utilise la fonction solve_ivp du module scipy.
solve_ivp(fun, t_span, y0, method='RK45', t_eval=None, dense_output=False, events=None, vectorized=False, args=None)
Les paramètres sont :
| Paramètre | Description |
|---|---|
| fun | Fonction qui définit notre système. L'appel est de la forme fun(t, y). |
| t_span | Intervalle d'intégration sous la forme [t0,tf]. |
| y0 | État initial du système. |
| method | Méthode d'intégration. Par défaut, utilise RK45. On peut aussi utiliser : RK23, DOP853, Radau, BDF, LSODA. On utilise les méthodes RK45, RK32 et DOP853 pour les problèmes d'équations différentielles non raides et les méthodes Radau, BDF et LSODA pour les problèmes d'équations différentielles raides (c'est à dire sensible aux paramètres). |
| t_eval | Les instants à évaluer. Par défaut, ils sont calculés automatiquement. |
| dense_output | S'il faut calculer une solution |
| events | Événements à suivre. |
| vectorized | Si le problème (fun) est mis en oeuvre de manière vectorisée. |
| arg | Les arguments à passer au problème (fun). |
La fonction retourne un dictionnaire contenant les champs suivants :
| Élément | Description |
|---|---|
| t | Table contenant les instants temporels. |
| y | Table de tableau contenant les valeurs de la solution. |
| sol | La solution trouvée par une instance "OdeSolution". |
| t_events | Liste de tables qui contient les événements détectés. |
| y_events | Pour chaque événement de "t_events" correspond la valeur de la solution. |
Plus d'info sur la fonction sur le lien suivant solve_ip.
Équation différentielle d'ordre 1¶
Démarche¶
Soit l'équation différentielle suivante : y'(t)+a\,y(t)+b=0
- On met l'équation sous la forme : y'(t) = f(t,y(t)) en précisent sa condition initiale
Cette mise en forme de l'équation différentielle est appelée problème de Cauchy. - On résout ensuite l'équation avec la fonction solve_ivp
from scipy.integrate import solve_ivp
import numpy as np
# Définition de l'équation différentielle
def equation(t, y):
a = 1
b = 2
return -a*y-b
t0 = 0 # seconde
tf = 1 # seconde
y0 = 0 # Condition initiale
# Résolution
solution = solve_ivp(equation, [t0, tf], [y0], max_step=0.1)
print(solution.t) # Affichage de la table des instants
print(solution.y[0]) # Affichage des résultats
1 2 3 4 5 6 | |
Ancienne fonction¶
Si la fonction solve_ivp n'est pas disponible, ce qui est possible sur les anciennes versions du module scipy, vous pouvez utiliser la fonction odeint.
from scipy.integrate import odeint
import numpy as np
# Définition de l'équation différentielle
def equation(y, t): # Attention inversion de t et y
a = 1
b = 2
return -a*y-b
t0 = 0
tf = 1 # seconde
y0 = 0 # Condition initiale
t = np.linspace(t0, tf, 11) # Création des instants de cacluls
# Résolution
y = odeint(equation, y0, t)
print(t) # Affichage des instants t
print(y[:, 0]) # Affichage des résultats
1 2 3 | |
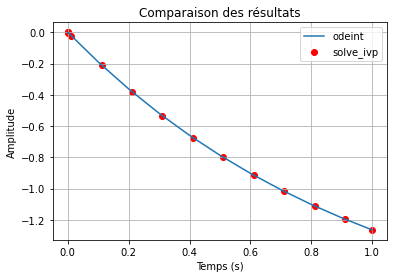
import matplotlib.pyplot as plt
# Tracé des deux résultats
plt.scatter(solution.t, solution.y[0], label="solve_ivp", color="red")
plt.plot(t, y[:, 0], label="odeint")
plt.ylabel('Amplitude')
plt.xlabel("Temps (s)")
plt.title("Comparaison des résultats")
plt.grid(which="both")
plt.legend()
plt.show()
Exemple¶
Soit le circuit électrique suivant :
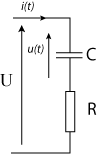
- Aux bornes du générateur, on a l'équation électrique suivante : u(t)+R\,i(t)=U
- L'intensité est liée à la charge du condensateur par l'équation : i(t)=\frac{dq}{dt}=C\frac{du(t)}{dt}
- On obtient alors l'équation différentielle suivante :
- On la met sous la forme : \frac{dy}{dt}=f(y)
- Si le condensateur est initialement déchargé, on à la condition initiale : u(t=0)=0
Résolution de l'équation différentielle :
from scipy.integrate import solve_ivp
import numpy as np
# Constantes du système
R = 10 # Ohms
C = 0.01 # F
U = 5 # V
# Définition de l'équation différentielle
def equation(t, u):
return (U-u)/(R*C)
t0 = 0
tf = 0.8 # seconde
u0 = 0 # Condition initiale
# Résolution
tension = solve_ivp(equation, [t0, tf], [u0])
# Calcul du courant traversant le condensateur
courant = (U-tension.y[0])/R
import matplotlib.pyplot as plt
# Tracé de la tension aux bornes du condensateur
plt.plot(tension.t, tension.y[0], label="u(t)")
plt.plot(tension.t, courant, label="i(t)")
plt.ylabel('u(t) en V et i(t) en A')
plt.xlabel("Temps (s)")
plt.title("Tension aux bornes du condensateur et courant le traversant")
plt.grid(which="both")
plt.legend()
plt.show()
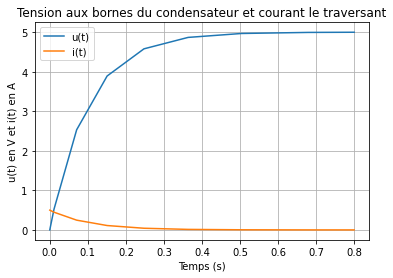
Système d'équations différentielles couplées d'ordre 1¶
Démarche¶
Soit le système d'équations différentielles couplées suivant :
Résolution du système :
from scipy.integrate import solve_ivp
import numpy as np
# Définition des paramètres du système
sigma = 10
rho = 28
beta = 8/3
# Définition des conditions initiales
x0 = 1
y0 = 1
z0 = 1
# Définition du système d'équation différentielle
def systeme(t, Y, σ, ρ, β):
x = Y[0]
y = Y[1]
z = Y[2]
dx_dt = σ*(y-x)
dy_dt = ρ*x-y-x*z
dz_dt = x*y-β*z
return [dx_dt, dy_dt, dz_dt]
# Résolution
solution = solve_ivp(systeme, [0, 40], [x0, y0, z0], method='RK45', args=(
sigma, rho, beta), max_step=0.01)
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# Récupération des résultats
x = solution.y[0]
y = solution.y[1]
z = solution.y[2]
# Tracé du résultat en 3D
fig = plt.figure()
ax = fig.gca(projection='3d')
ax.plot(x, y, z, label='Attracteur étrange')
plt.title("Système de Lorenz")
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
plt.tight_layout()
plt.show()
Exemple pour une machine à courant continu¶
Soit le modèle suivant de la machine à courant continu :
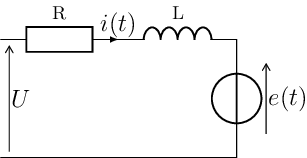
- L'équation électrique s'écrit :
- Avec e(t)=K_e\,\omega_m(t)
- On la met sous la forme : \frac{dy}{dt}=f(y)
- L'équation mécanique de la MCC s'écrit : J\,\frac{d\omega_m(t)}{dt} = Cm(t)-Cr avec C_m(t)=K_t\,i(t)
- On obtient alors le système d'équations différentielles suivant :
Résolution du système :
from scipy.integrate import solve_ivp
import numpy as np
# Définition du système
def systeme(t, y):
# Définitions des constantes du système
R = 0.345 # Ohms
L = 0.04e-3 # H
U = 6 # V
J = 14.5e-6 # kgm²
Ke = 1/(1640*np.pi/30) # Vs/rad
Kt = 5.84e-3 # Nm/A
Cr = 0.143*Kt # Nm
omega = y[0]
i = y[1]
dwdt = (Kt*i-Cr)/J
didt = -R*i/L+(U-Ke*omega)/L
return [dwdt, didt]
# Résolution
sol = solve_ivp(systeme, [0, 1.5], [0, 0])
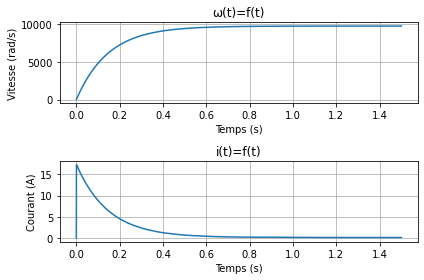
import matplotlib.pyplot as plt
# Tracé de la vitesse
plt.subplot(211)
plt.plot(sol.t, sol.y[0]*30/np.pi, label="ω(t)")
plt.ylabel('Vitesse (rad/s)')
plt.xlabel("Temps (s)")
plt.title("ω(t)=f(t)")
plt.grid(which="both")
# Tracé du courant
plt.subplot(212)
plt.plot(sol.t, sol.y[1], label="i(t)")
plt.ylabel('Courant (A)')
plt.xlabel("Temps (s)")
plt.title("i(t)=f(t)")
plt.grid(which="both")
plt.tight_layout() # Adaptation de l'affichage pour éviter les superpositions
plt.show()
Équations différentielles d'ordre 2¶
Démarche¶
La fonction solve_ivp ne pouvant résoudre que des équations différentielles d'ordre 1, il faut ramener l'équation différentielle d'ordre 2 à un système d'équations différentielles d'ordre 1.
- Soit l'équation : y''(t)+a\, y'(t)+b\,y(t)+c=0
- On pose y_1(t)=y(t) et y_2(t)=y'(t), ce qui donne : y_2'(t)+a\, y_1'(t)+b\,y_1(t)+c=0
- On la met sous la forme : y_2'(t)=-a\, y_1'(t)-b\,y_1(t)-c
- On pose alors le système :
- Cela nous ramène à résoudre le problème de Cauchy suivant :
Résolution du système :
from scipy.integrate import solve_ivp
import numpy as np
# Définition des paramètres du système
a = 1
b = 2
c = -1
# Définition des conditions initiales
C_0 = 1
C_1 = 1
# Définition du système d'équation différentielle
def systeme(t, Y, a, b, c):
y1 = Y[0]
y2 = Y[1]
dy1_dt = y2
dy2_dt = -a*dy1_dt-b*y1-c
return [dy1_dt, dy2_dt]
# Résolution
solution = solve_ivp(systeme, [0, 1], [C_0, C_1], method='RK45', args=(
a, b, c))
print(solution.y[0]) # Affichage des valeurs de x1
print(solution.y[1]) # Affichage des valeurs de x2
1 2 | |
Exemple système masse/ressort¶
Soit le système masse-ressort suivant :
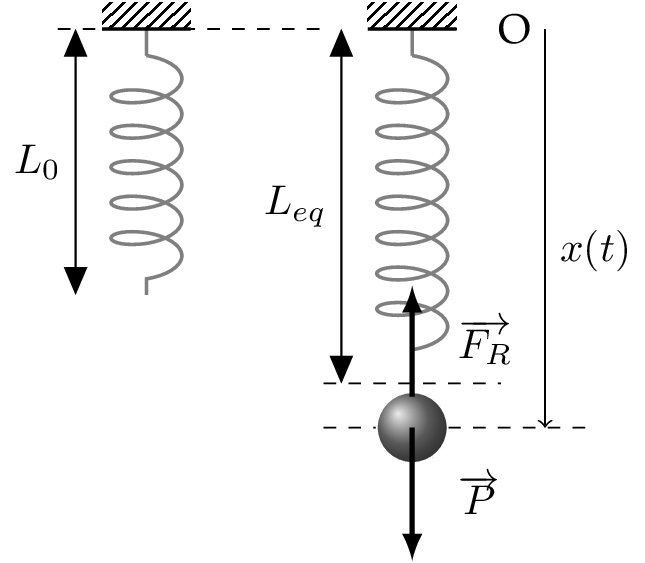
On cherche à connaitre la position de la masse au court du temps en fonction de la position initiale.
- En isolant la masse, on identifie 2 efforts qui s'y appliquent dans un modèle simplifié (on prend \vec{x} positif vers le bas) :
- Le poids : \vec{P}=m\,g\,\vec{x}
- La force de rappel du ressort : \vec{F_R}=-k\,(x(t)-L_0)\,\vec{x}
- On ne considère que le déplacement selon l'axe \vec{x} de la masse, elle est donc en translation. En appliquant le principe fondamental de la dynamique, on trouve l'équation : m\,g\,\vec{x}-k\,(x(t)-L_0)\,\vec{x}=m\,\vec{a}
- La projection sur l'axe \vec{x} nous donne alors l'équation différentielle suivante :
- En appliquant la méthode précédente et en posant x(t)=x_1(t) et x_2(t)=\dot{x}(t), on obtient le problème de Cauchy suivant :
Résolution du système :
#### from scipy.integrate import solve_ivp
import numpy as np
# Définition des paramètres du système
m = 0.2 # kg
k = 10 # N/m
g = 9.81 # m/s²
L0 = 0.1 # m
# Définition des conditions initiales
C_0 = 0.2 # m
C_1 = 0 # m/s
# Définition du système d'équation différentielle
def systeme(t, X):
x_1 = X[0]
x_2 = X[1]
dx1_dt = x_2
dx2_dt = -k/m*x_1+g+L0*k/m
return [dx1_dt, dx2_dt]
t0 = 0 # seconde
tf = 6 # seconde
# Solution exact
w0 = np.sqrt(k/m)
t = np.linspace(t0,tf,100)
masse_x = -(C_0-L0)*np.cos(w0*t)+m*g/k+L0
# Résolution
position = solve_ivp(systeme, [t0, tf], [C_0, C_1], method='RK45',max_step=0.1)
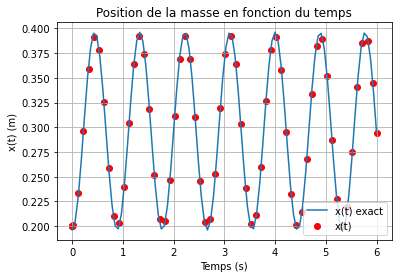
import matplotlib.pyplot as plt
# Tracé de la position de la masse
plt.plot(t, masse_x, label="x(t) exact")
plt.scatter(position.t, position.y[0], label="x(t)", color='red')
plt.ylabel('x(t) (m)')
plt.xlabel("Temps (s)")
plt.title("Position de la masse en fonction du temps")
plt.grid(which="both")
plt.legend()
plt.show()
Exemple trajectoire d'un projectile¶
On souhaite connaître la position d'un projectile, dont le système est représenté ci-dessous :
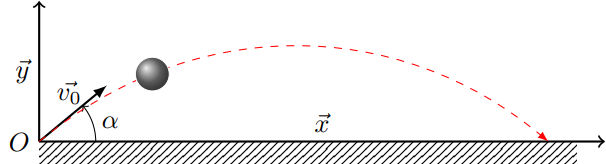
- On fait les hypothèses suivantes :
- le frottement de l'air est négligeable (vitesse faible de l'objet) : \vec{f}=\vec{0} ;
- la variation de pression atmosphérique négligeable (variation d'altitude faible) : \vec{F}=\vec{cste} ;
- la poussée d'Archimède est négligeable (projectile de densité très supérieure à celle de l'air) : \vec{F}=\vec{0} ;
- l'altitude et la distance parcourue sont très inférieures au rayon de la planète : \vec{g}=\vec{cste}.
- Le projectile n'est alors soumis qu'à son poids : \vec{P}=-m\,\vec{g}
- L'application du principe fondamental de la dynamique, on obtient : -m\,g\,\vec{y}=m\,\vec{a}
- En projetant sur les deux axes, on obtient le système suivant :
- En posant X=\dot{x} et Y=\dot{Y}, on obtient le système d'équations différentielles suivant :
Résolution du système :
from scipy.integrate import solve_ivp
import numpy as np
# Définition des paramètres du système
m = 1 # kg
g = 9.81 # m/s²
# Définition des conditions initiales
V_0 = 10 # m/s
alpha = 20*np.pi/180 # rad
X_0 = V_0*np.cos(alpha) # m/s
Y_0 = V_0*np.sin(alpha) # m/s
x_0 = 0 # m
y_0 = 0 # m
# Définition du système d'équation différentielle
def pos_x(t, Y):
x = Y[0]
X = Y[1]
y = Y[2]
Y = Y[3]
dx_dt = X
dX_dt = 0
dy_dt = Y
dY_dt = -g
return [dx_dt, dX_dt, dy_dt, dY_dt]
# Résolution
position = solve_ivp(
pos_x, [0, 10], [x_0, X_0, y_0, Y_0], method='RK45', max_step=0.001)
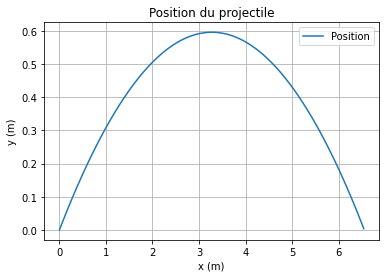
import matplotlib.pyplot as plt
# Recherche de l'index où le projectile est au-dessus du sol
index = np.where(position.y[2] >= 0) # y>=0
# Tracé de la position du projectile
plt.plot(position.y[0][:index[0][-1]], position.y[2]
[:index[0][-1]], label="Position")
plt.ylabel('y (m)')
plt.xlabel("x (m)")
plt.title("Position du projectile")
plt.grid(which="both")
plt.legend()
# plt.save_fig("projectile.pdf")
plt.show()
Équation différentielle d'ordre n¶
Le raisonnement de l'équation différentielle d'ordre 2 peut se généraliser à l'ordre n.
Une équation différentielle d'ordre n peut s'écrire sous la forme d'un système de n équations différentielles d'ordre 1.