Modélisation et réponse des SLCI¶
Le module scipy.signal permet un certain nombre de traitements, calcul, modélisation autour des systèmes linéaire, continu et invariant (SLCI).
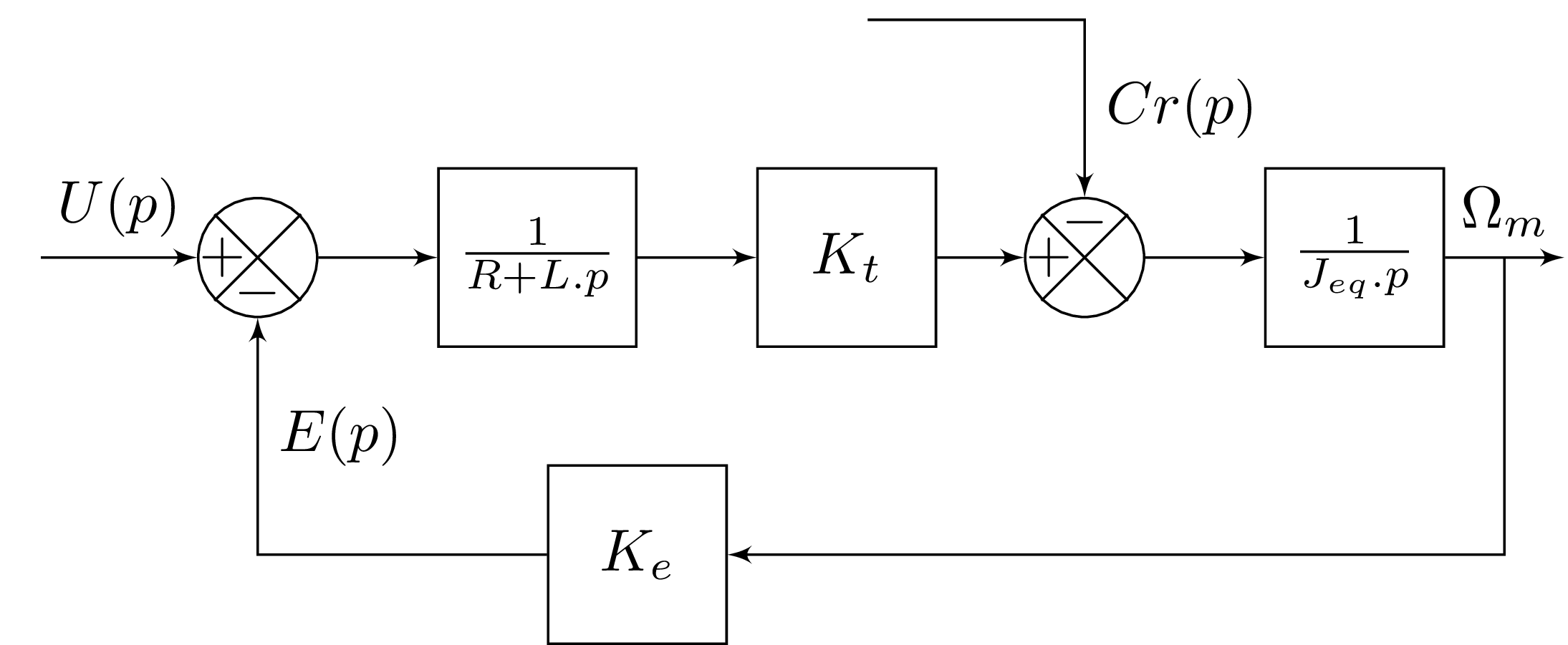
Pour cette partie, nous nous baserons sur le modèle d'une machine à courant continu dont le schéma-bloc et visible ci-dessous :
Avec les grandeurs physiques suivantes :
- Tension nominale : 12 V
- Résistance d'induit : 2,07 \Omega
- Inductance d'induit : 0,227 mH
- Constante de couple : 13,9 mNm/A
- Constante de vitesse : 689 rmp/V
- Couple résistant (frottement sec ici) : 0,7923 mNm
- Inertie du rotor : 13,6 gcm²
import numpy as np
import matplotlib.pyplot as plt
from scipy import signal
# Constantes du système
Un = 12 # V
R = 2.07 # Ohms
L = 0.227e-3 # H
Kt = 13.9e-3 # Nm/A
Ke = 1/(np.pi*689/30)
Cr = 0.7923e-3 # Nm
Jeq = 13.6e-7 # kgm²
Modélisation du système¶
Pour construire un modèle SLCI sous python, il existe la fonction signal.lti() qui permet de créer le système SLCI.
Le système peut être créé de 3 façons différentes :
- Par la fonction de transfert en passant le numérateur et le dénominateur comme paramètres ;
- Par la connaissance des zéros, pôles et gains du système ;
- Par une représentation d'états avec comme paramètres A, B, C, D.
Plus d'information à la page scipy.signal.lti
Info
Dans notre cas, nous utiliserons uniquement les fonctions de transfert, en appelant la fonction par signal.lti(num,denom) avec num et denom des tableaux du numérateur et du dénominateur de la fonction de transfert.
Par exemple pour H(p)=\frac{2p+1}{5+3p+p^2}, on aura num = [2,1] et denom = [1,3,5]. S’il n'y a pas de dénominateur, denom = [1].
Démarche¶
Dans le cas de la MCC, nous avons un système à deux entrées U(p) et Cr(p) qui est impossible à définir directement dans python.
Il faudra utiliser le théorème de superposition pour calculer la réponse complète du système avec deux fonctions de transfert :
- H_U(p) = \frac{\Omega_m(p)}{U(p)} avec Cr(p)=0 ;
- H_{Cr}(p) = \frac{\Omega_m(p)}{Cr(p)} avec U(p)=0.
Fonction de transfert sans perturbation¶
Dans un premier temps, nous n'allons pas tenir compte de la perturbation (Cr=0).
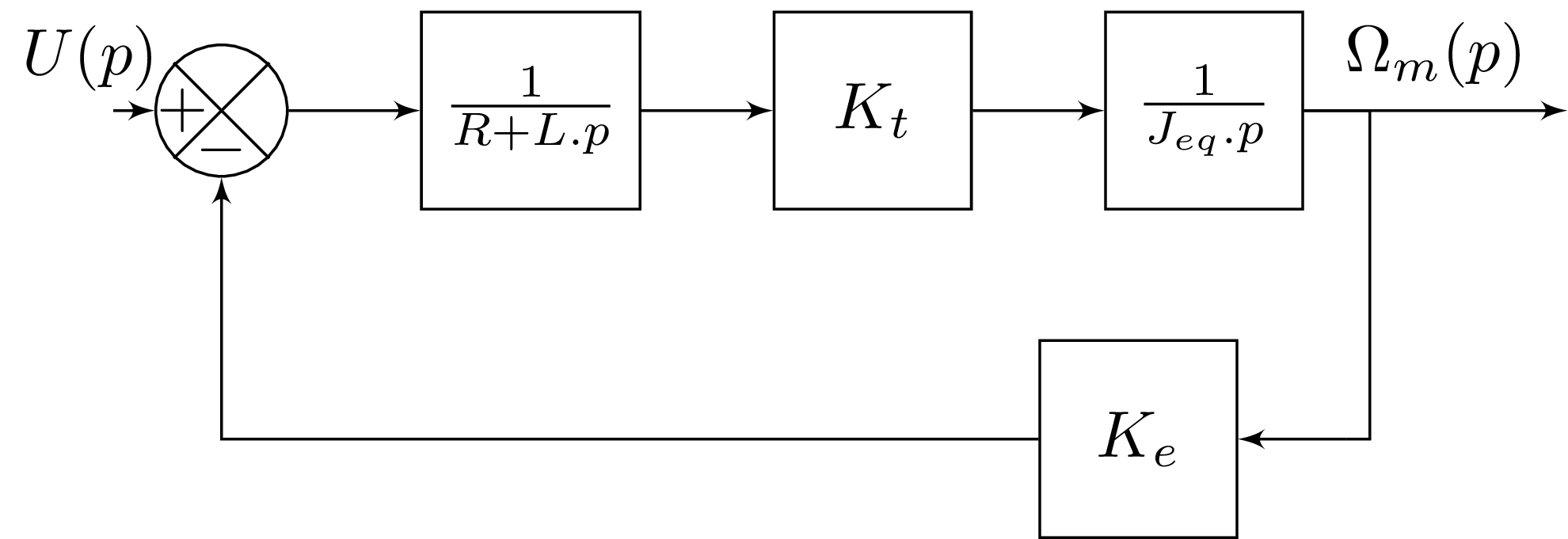
La fonction de transfert vos : H_U(p)=\frac{\frac{1}{R+Lp}K_t\frac{1}{J_{eq}p}}{1+\frac{1}{R+Lp}K_t\frac{1}{J_{eq}p}K_e}
Une fois mise sous forme canonique, on obtient :
# Construction du modèle
# Définition du numérateur et du dénominateur
num = [1/Ke]
denom = [L*Jeq/(Ke*Kt), R*Jeq/(Ke*Kt), 1]
# Création de la fonction de transfert
ft_U = signal.lti(num, denom)
Fonction de transfert de la perturbation¶
Si on pose U(p)=0, on obtient le modèle suivant :
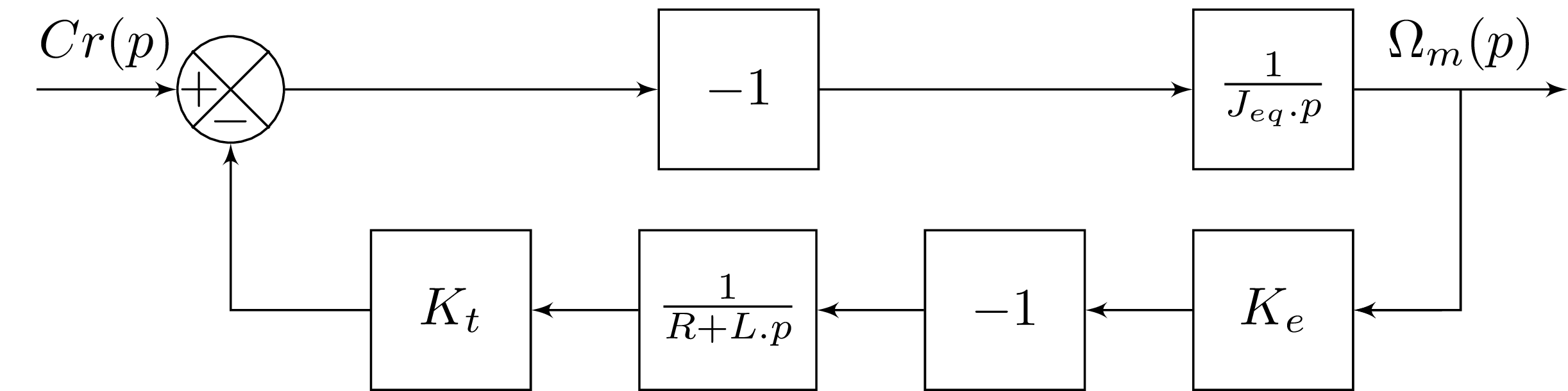
La fonction de transfert sous forme canonique vaut alors :
# Construction du modèle
# Définition du numérateur et du dénominateur
num = [-L/(Ke*Kt), -R/(Ke*Kt)]
denom = [L*Jeq/(Ke*Kt), R*Jeq/(Ke*Kt), 1]
# Création de la fonction de transfert
ft_Cr = signal.lti(num, denom)
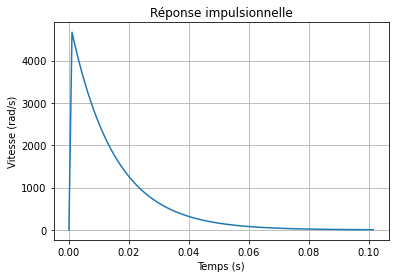
Réponse impulsionnelle¶
Calcul de la réponse impulsionnelle sans perturbation.
Pour cela on utilise la fonction signal.impulse(ft, X0=None, T=None, N=None) avec comme paramètres optionnels :
X0le vecteur d'état initial, par défaut nul ;Tun tableau des instants temporel à calculer ;Nle nombre de points à calculer siTn'est pas défini.
# Réponse impulsionnelle
t, y = signal.impulse(ft_U, N=100)
# Affichage
plt.plot(t, y)
plt.grid(True)
plt.xlabel("Temps (s)")
plt.ylabel("Vitesse (rad/s)")
plt.title("Réponse impulsionnelle")
plt.show()
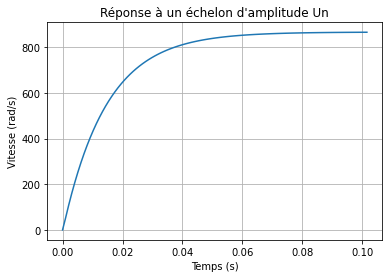
Réponse indicielle ou réponse à un échelon¶
Calcul de la réponse à un échelon unitaire sans perturbation.
La fonction utilisée est signal.step(ft, X0=None, T=None, N=None) avec comme paramètres optionnels :
X0le vecteur d'état initial, par défaut nul ;Tun tableau des instants temporel à calculer ;Nle nombre de points à calculer siTn'est as défini.
La fonction calcul la réponse à un échelon unitaire uniquement. Pour d'autres valeurs d'échelon, il suffit de multiplier la réponse l'amplitude de l'échelon.
# Réponse indicielle
t, y = signal.step(ft_U)
# La tension appliquée étant de Un=12 V pour le moteur
y = y*Un
# Affichage
plt.plot(t, y)
plt.grid(True)
plt.xlabel("Temps (s)")
plt.ylabel("Vitesse (rad/s)")
plt.title("Réponse à un échelon d'amplitude Un")
plt.show()
print("Valeur finale (tr/min) :", y[-1]*30/np.pi)
1 | |
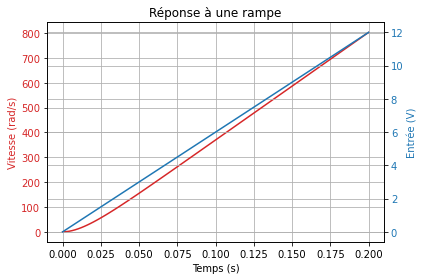
Réponse à une entrée quelconque¶
Il est possible de calculer la réponse du système pour n'importe quelle entrée avec la fonction signal.lsim(ft, U, T, X0=None) avec les paramètres suivants :
Uun tableau de l'amplitude de l'entrée ;Tun tableau des instants temporels de calcul de même taille queU;X0un vecteur d'état initial, par défaut nul .
# Construction de l'entrée
temps = np.linspace(0, 0.2, 100)
entree = np.linspace(0, Un, 100) # Une rampe
t, y, _ = signal.lsim(ft_U, U=entree, T=temps)
fig, ax1 = plt.subplots()
color = 'tab:red'
ax1.set_xlabel('Temps (s)')
ax1.set_ylabel('Vitesse (rad/s)', color=color)
ax1.plot(t, y, color=color)
ax1.tick_params(axis='y', labelcolor=color)
ax1.grid(True)
ax2 = ax1.twinx() # Création d'un deuxième axe qui partage le même axe x
color = 'tab:blue'
ax2.set_ylabel('Entrée (V)', color=color) # Label de l'axe x
ax2.plot(temps, entree, color=color)
ax2.tick_params(axis='y', labelcolor=color)
plt.grid(True)
plt.title("Réponse à une rampe")
fig.tight_layout() # Amélioration de l'affichage
plt.show()
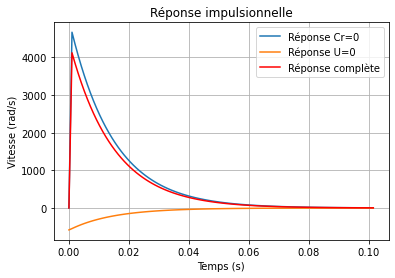
Réponse avec la perturbation¶
Cette fois on va calculer la réponse en tenant compte de la perturbation en utilisant le théorème de superposition.
Attention
Le couple résistant étant un couple de frottement, il ne fera pas tourner le moteur en sens inverse, il faut donc "supprimer" les valeurs négatives qui seront calculées par le théorème de superposition.
Réponse impulsionnelle¶
# Réponse impulsionnelle
t_U, y_U = signal.impulse(ft_U, N=100) # Sans perturbation
t_Cr, y_Cr = signal.impulse(ft_Cr, N=100) # De la perturbation
y_Cr = y_Cr*Cr # Application du couple résistant
y = y_U+y_Cr # Calcul de la réponse complète
y[np.where(y < 0)] = 0 # Pas de valeurs négatives ici pour le moteur
# Affichage
plt.plot(t_U, y_U, label="Réponse Cr=0")
plt.plot(t_Cr, y_Cr, label="Réponse U=0")
plt.plot(t_U, y, label="Réponse complète", color="red")
plt.grid(True)
plt.legend()
plt.xlabel("Temps (s)")
plt.ylabel("Vitesse (rad/s)")
plt.title("Réponse impulsionnelle")
plt.show()
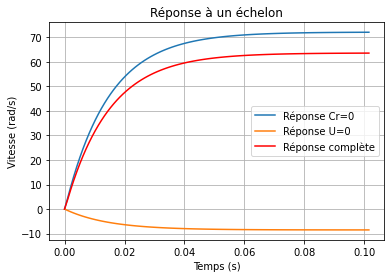
Réponse à un échelon¶
# Réponse impulsionnelle unitaire
t_U, y_U = signal.step(ft_U, N=100) # Sans perturbation
t_Cr, y_Cr = signal.step(ft_Cr, N=100) # De la perturbation
y_Cr = y_Cr*Cr # Application du couple résistant
y = y_U+y_Cr # Calcul de la réponse complète
y[np.where(y < 0)] = 0 # Pas de valeurs négatives ici pour le moteur
# Affichage
plt.plot(t_U, y_U, label="Réponse Cr=0")
plt.plot(t_Cr, y_Cr, label="Réponse U=0")
plt.plot(t_U, y, label="Réponse complète", color="red")
plt.grid(True)
plt.legend()
plt.xlabel("Temps (s)")
plt.ylabel("Vitesse (rad/s)")
plt.title("Réponse à un échelon")
plt.show()